The Automated Guided Vehicle (AGV) was my final year project during my undergraduate studies. The task that we outlined was to provide a vehicle capable of navigate autonomously from one location to another on a shop floor.
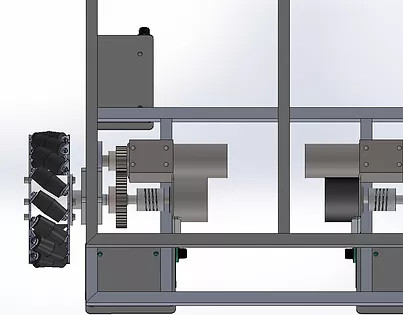
The AGV was driven by omnidirectional 4 wheel mecanum drive system. Motors, which were used to drive the AGV were coupled with optical encoders. PID drive was implemented using these encoders, in conjunction with LM629, a PID driver IC. ARM STM32F3 was used as the main controller. Baseboard for main controller and LM629 Slave board were designed and developed.
SolidWorks Model
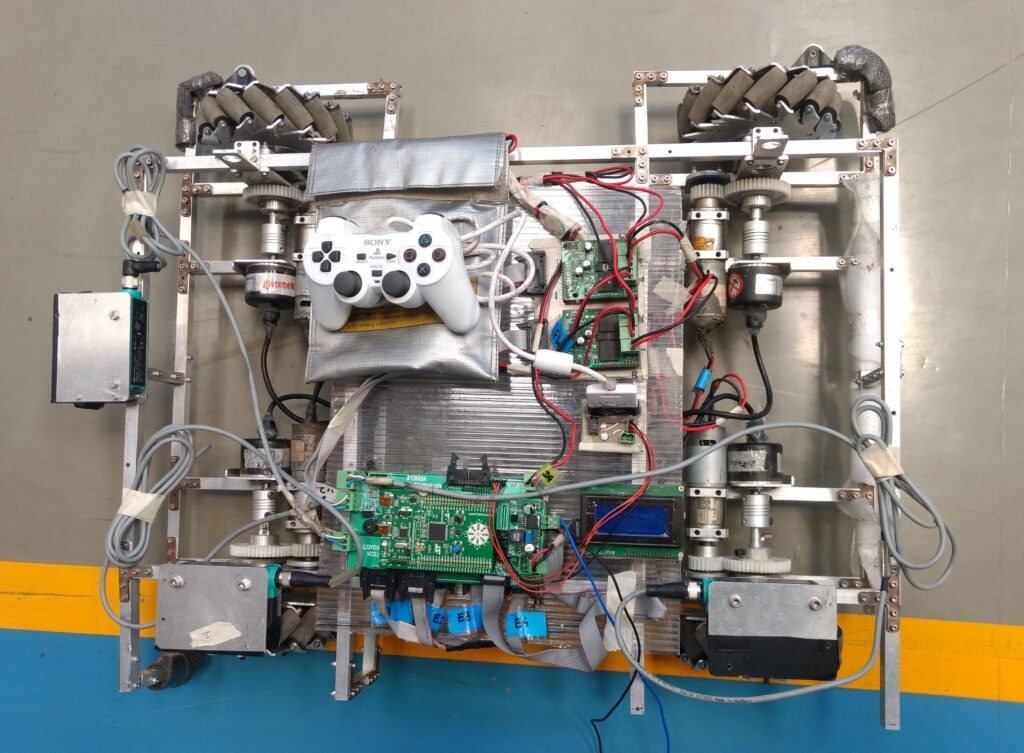
Working Prototype
The AGV could operate in the autonomous mode as well as in the manual mode using a console. The maximum speed achieved was 300cm/sec.
This project won the “Best Innovative Undergraduate Project” award from alumni association of College of Engineering, Pune(COEP).