Line sensing is widely used in Robotics for path following applications. Smooth working of line sensing robot is highly dependent on lighting conditions and stabilized working environment. These robots needs calibration with change in working environment. Knowing this limitations, I have designed and developed a line sensing module keeping modularity and industrial application in mind.
Line sensor module prototype
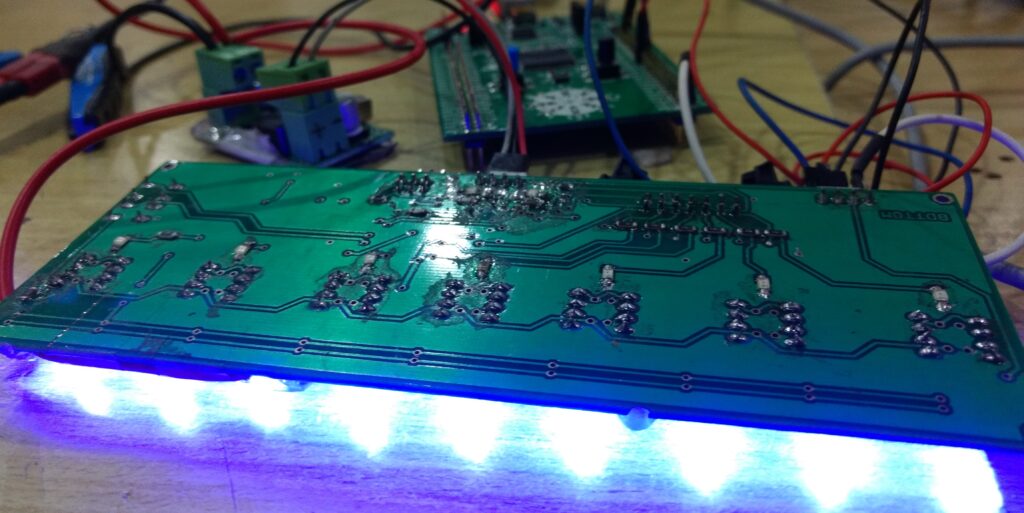
Line sensor module testing
Line sensor module had ATmega32-A as microcontroller. The firmware for this module is developed with Autocalibration feature. Using this feature module can easily can adapt to current working environment. Main controller was able to create suitable lights which can produce highest contrast between line and background for current working environment using PWM controlled RGB lights.
Printed circuit board was designed and developed with provision for communication interfaces like USART, I2C, SPI etc. so that it can be easily interfaced with master controller of any robot. This enabled to save recourses of the main microcontroller of robot by offloading the task of line following to this module.